
Tutorial de Uso del Módulo L298N Deja un comentario
En este tutorial explicaremos paso a paso todas las características del módulo L298 y un ejemplo básico de programación con Arduino.
 El módulo L298N posee dos canales de Puente H, pudiéndolos utilizar para controlar dos motores DC o un motor Pasó a Paso, controlando el sentido de giro y velocidad.
El módulo L298N posee dos canales de Puente H, pudiéndolos utilizar para controlar dos motores DC o un motor Pasó a Paso, controlando el sentido de giro y velocidad.
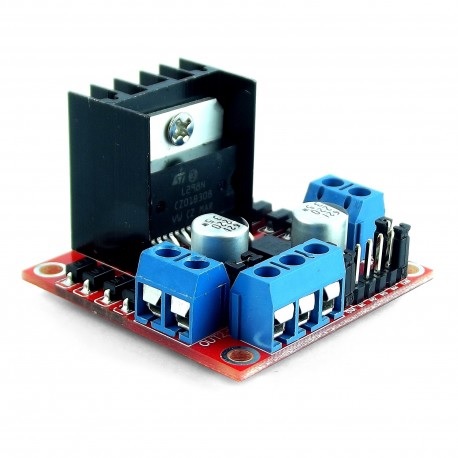
Básicamente está conformado por un driver L298N sus diodos de protección y un regulador de voltaje de 5V(78M05)
Su esquema electrónico es el siguiente:
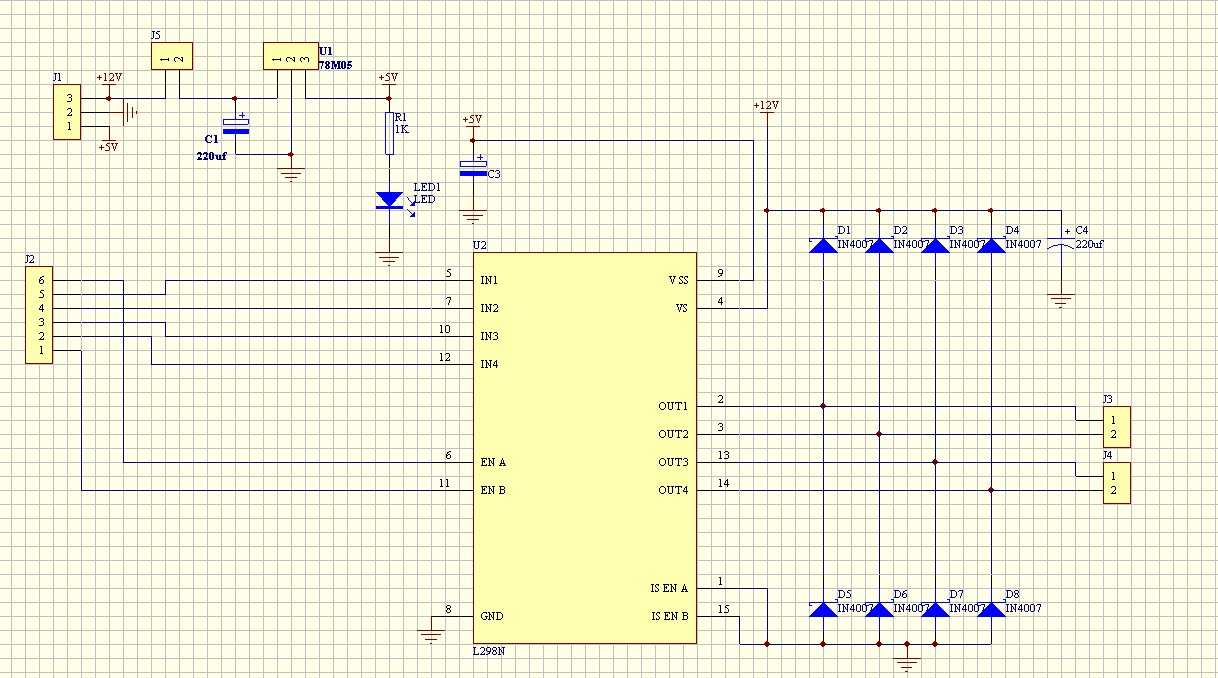
Posee un conector de 6 pines para ingresar las señales TTL para controlar los motores, una bornera de tres pines para la alimentación, y dos borneras de 2 pines para la salida a los motores.
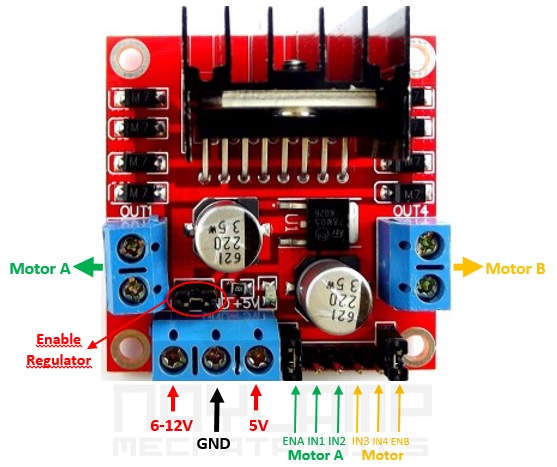
Empecemos explicando la forma de alimentar el módulo, hay dos formas de hacer esto:
1. Utilizando una sola fuente, conectada a la entrada de 12V y con el Jumper para habilitar el regulador, aclarando que el voltaje de la fuente es el que soporta el motor. De esta forma la entrada de 5V no debe estar conectada a ninguna fuente, ya que en este pin están presentes 5V a través del regulador interno; pero puedes utilizar este pin como una salida de 5V, pero sin exceder los 500mA de consumo. Se recomienda hacer esta conexión para voltajes menores de 12V para no sobrecalentar el regulador
2. Utilizando dos fuentes, una de 5V conectada a la entrada de 5V (puede ser los 5V de un Arduino) y otra fuente con el valor del voltaje que trabaja el motor, conectada al pin de 12V. Para esto se tiene que desconectar el Jumper lo que deshabilitará al regulador.
Para el control del módulo:
Los pines ENA, IN1, IN2 correspondes a las entradas para controlar el MOTOR A (OUT1 y OUT2)
De igual manera ENB, IN3, IN4 permiten controlar el MOTOR B (OUT3 y OUT4)
ENA y ENB, sirven para habilitar o deshabilitar sus respectivos motores, generalmente se utilizan para controlar la velocidad, ingresando una señal de PWM por estos pines. Si no se usan se deben de conectar los Jumper para que siempre estén habilitados.
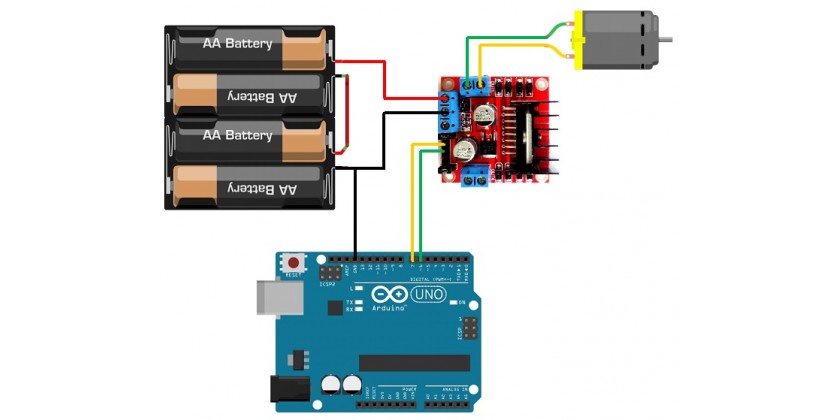
Ahora realicemos un ejemplo básico para controlar un motor DC
En el ejemplo utilizaremos un motor de 6V y lo conectaremos de la primera forma antes explicado.

Como vemos en la imagen para controlar el motor solo utilizaremos dos pines del Arduino.
Si enviamos un 1 lógico por la entrada IN1 del driver, saldrán 6V por la salida OUT1 (cable de color Amarillo en la imagen) y si enviamos un 0 lógico por IN1, saldrá GND (0V) por OUT1
De igual manera sucede con el pin IN2.
Por ejemplo si queremos hacer girar el motor en una dirección, enviamos:
IN1=1 -> OUT1= 6V
IN2=0 -> OUT2= GND
Y para invertir el sentido de giro:
IN1=0 -> OUT1=GND
IN2=1 -> OUT2=6V
EL código en Arduino sería el siguiente:
int PinIN1 = 7;
int PinIN2 = 6;
void setup() {
// inicializar la comunicación serial a 9600 bits por segundo:
Serial.begin(9600);
// configuramos los pines como salida
pinMode(PinIN1, OUTPUT);
pinMode(PinIN2, OUTPUT);
}
void loop() {
MotorHorario();
Serial.println("Giro del Motor en sentido horario");
delay(1000);
MotorAntihorario();
Serial.println("Giro del Motor en sentido antihorario");
delay(1000);
MotorStop();
Serial.println("Motor Detenido");
delay(1000);
}
void MotorHorario()
{
digitalWrite (PinIN1, HIGH);
digitalWrite (PinIN2, LOW);
}
void MotorAntihorario()
{
digitalWrite (PinIN1, LOW);
digitalWrite (PinIN2, HIGH);
}
void MotorStop()
{
digitalWrite (PinIN1, LOW);
digitalWrite (PinIN2, LOW);
}
Como se observa en el programa se han implementado funciones para cada movimiento del motor, las cuales llamamos desde el void loop(),
Inicialmente hacemos girar el motor en sentido horario, luego en antihorario y después lo detenemos, esto se repite constantemente, cada estado lo enviamos por comunicación serial a la PC.
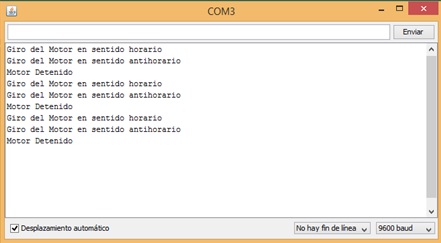
Si el sentido de giro no corresponde al que se muestra en el monitor serial, simplemente invertir la polaridad de la conexión del motor, o también cambiar las funciones en el programa.
Puedes Adquirir los componentes usados en este tutorial desde nuestra tienda:
– Modulo L298N
– Arduino
– Cables Dupont macho-hembra
– Motor DC