

Tutorial: robot coche – Shield módulo de potencia L293D (4 motores DC) Deja un comentario

Explicación inputs/outputs del módulo
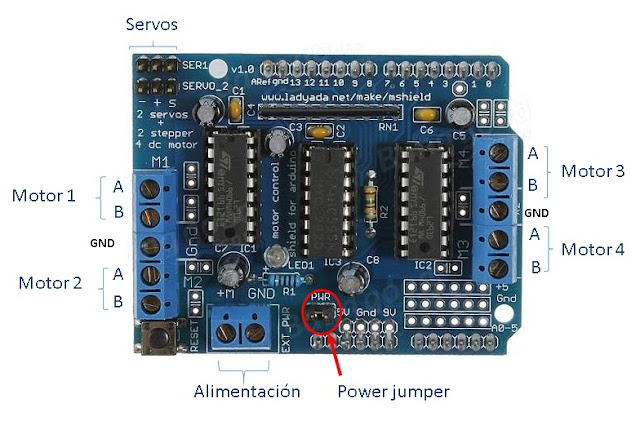
En primera instancia, comentar que esta shield permite separar la alimentación del Arduino de los motores, pese a estar acoplada la Shield. Esto se hace mediante el “Power Jumper”: estando cerrado la alimentación será conjunta y estando abierto, la alimentación será separada.
La alimentación de los motores se hace por las entradas +M y GND (Alimentación), conectando primero al positivo de la batería (si es un portapilas, cable rojo) y el negativo al GND (cable negro del portapilas)
La salida de los motores será por las bornas A y B. Se pueden quedar las bornas de GND sin usar.
IMPORTANTE conectar positivo y negativo de forma simétrica de los motores para que los motores giren en la misma dirección.
En la parte de los servos están las tres conexiones necesarias para los servomotores: positivo, negativo y la salida digital (marcados con +, – y S, respectivamente).
Programa
Se puede controlar los motores en modo todo o nada tal y como se resolvió con el anterior módulo, si bien es cierto que existe una librería para utilizar la shield que simplifica mucho su uso.
Primero, se descarga la librería en el siguiente enlace y luego se procede a su instalación.
El programa será el siguiente
#include //incluir librería AF_DCMotor Motor1(1); //definir que vamos a usar el motor 1 void setup(){ Motor1.setSpeed(200); //definimos la velocidad del motor 1 Motor1.run(RELEASE); // motor en punto muerto al iniciar el programa } void loop(){ Motor1.run(FORWARD); // orden de avanzar el motor delay (2000); Motor1.setSpeed(180); //cambio de velocidad del motor Motor1.run(BACKWARD); // orden de retroceder el motor delay (2000); }
Content retrieved from: http://elcajondeardu.blogspot.com.ar/2016/06/tutorial-robot-coche-shield-modulo-de.html.