
Torreta servo controlada por Arduino: Montaje y conexión Deja un comentario
En la entrada anterior comenzamos el proyecto de montar una torreta servo, una plataforma móvil de 2-DOF que nos permite orientar un sensor o actuador, presentando el presupuesto.
En esta nos vamos a centrar en el montaje y el esquema eléctrico de este pequeño proyecto, es muy útil en múltiples situaciones.
Torreta servo plástico
Bueno, tampoco es que sea precisamente el montaje más difícil del mundo. Básicamente los servos van a hacer la función de medio cuerpo y articulaciones.

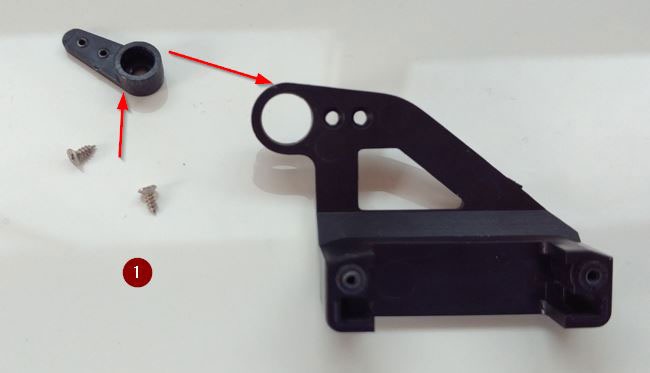
Para unirlo los servos con las piezas de la torreta, usaremos los servo horns (los accesorios que se ponen en el eje del servo).
En algunos casos al comprar la torreta nos vienen unos servo horns que tienen las dimensiones adecuadas para montar en la torreta. Si nuestra torreta no los tiene, tendremos que usar los que nos dan con el servo.
Vamos a ver los pasos necesarios para montar la torreta en el orden correcto. Si os saltáis algún paso os descubriréis desmontando alguna parte :).
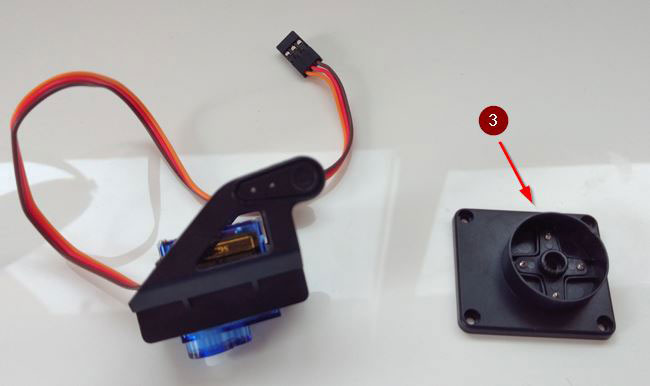
-
- Atornillamos el servo horn que acogerá el segundo servo.
-
- Atornillamos la parte superior de la torreta en torno a uno de los servos.
-
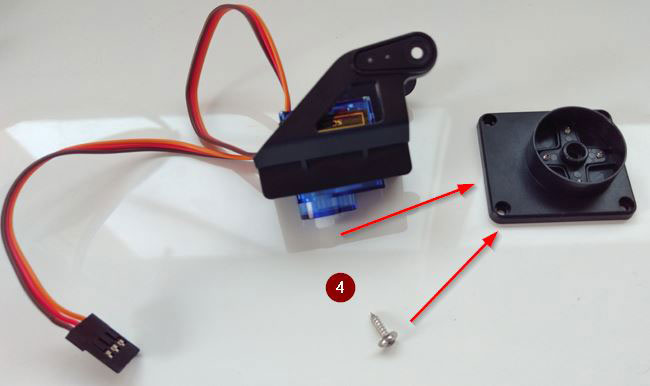
- Atornillamos la cruceta inferior a la base de la torreta.
-
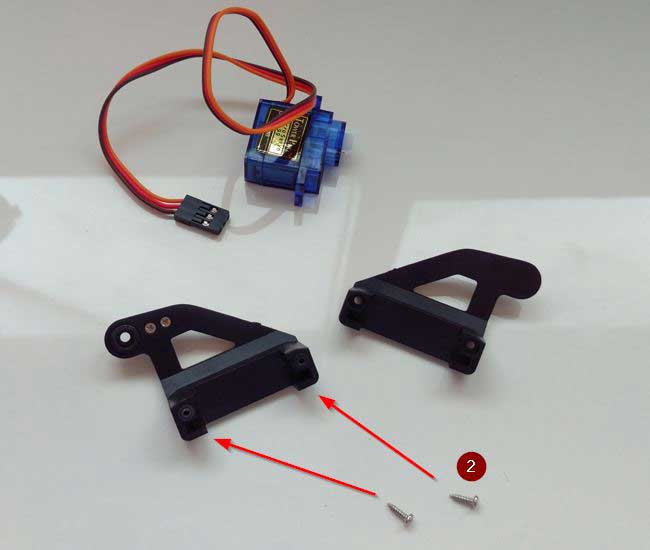
- Unimos la parte intermedia de la torreta a la base, atornillando el servo a la cruceta inferior.
-
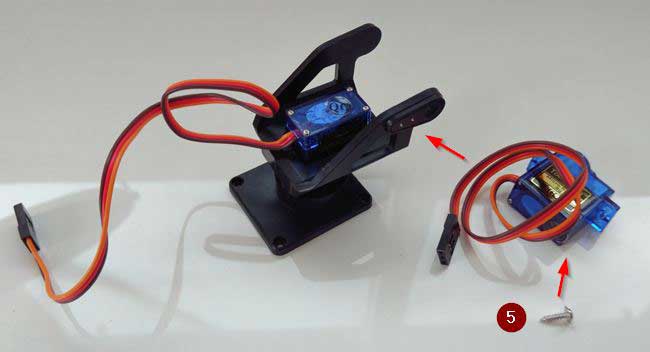
- Fijamos el segundo servo al cuerpo de la torreta, usando el servo horn colocado en el paso 1.
-
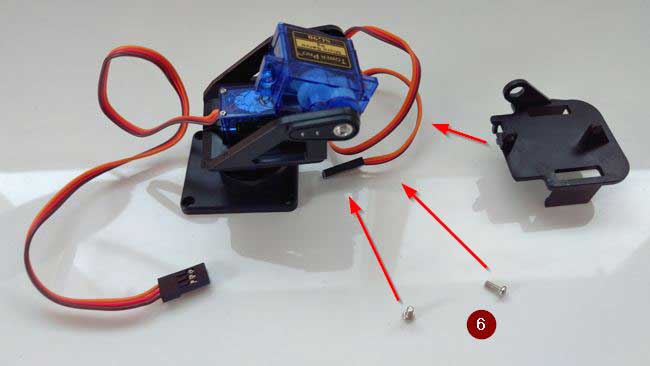
- Atornillamos la parte superior de la torreta, usando los agujeros de sujección lateral del segundo servo.
Hasta aquí la teoría. Ahora la realidad/problemas que os vais a encontrar. Los servo horns que nos dan con la torreta a veces encajan demasiado justos en el eje del servo, y tendremos que hacer un poco de fuerza, con mucho cuidado de no romper el servo.
Por otro lado, si en la torreta que hemos comprado no nos vienen servo horn, tendremos que usar los que nos salen con el servo. En este caso, no van a encajar perfectamente en la torreta. En particular.
- En el paso 1 es posible que tengas que cortar un poquito la punta del servo horn.
- En el paso 4 normalmente no os entrará cruceta. Tendréis que recortar y, en bastantes ocasiones, pegar con pegamento (e incluso patex a mansalva).
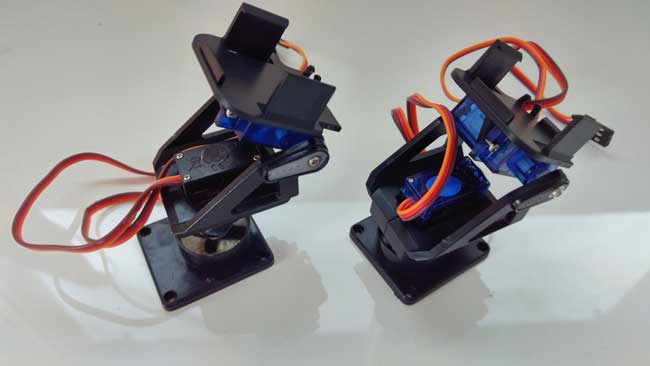
Torreta servo metálica
En el caso de un servo metálico
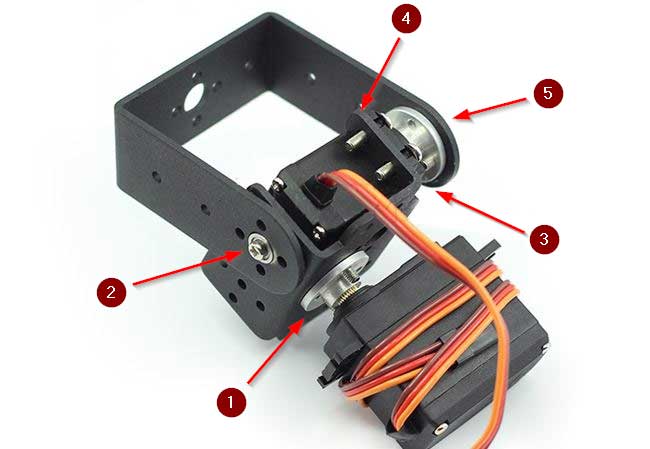
- Unir el bracket inferior al primero servo usando el servo horn cicular.
- Atornillar ambos brackets con la pieza que forma la articulación.
- Atornillar el servo horn al segundo servo.
- Deslizar el segundo servo hasta el bracket inferior y atornillarlos.
- Atornillar el horn del segundo servo al bracket superior
Por otro lado, hay que tener en cuenta que hay que calibrar los servos. Es decir, tenemos que hacer que el rango de movimiento del servo coincida con el que queremos, por ejemplo, que la torreta haga -90 a 90º.
En primer lugar, resulta conveniente poner los servos a 0º antes de realizar el montaje. Aun así es casi inevitable que se os mueva, aunque sea levemente, al hacer el montaje. Por tanto, una vez montado, tendréis que volver a ponerlos a cero y ajustarlo, y por último terminar el ajuste fino en código.
Un proceso bastante peñazo tedioso al que debéis ir acostumbrándoos porque va a ser una constante en todos los proyectos con servos.
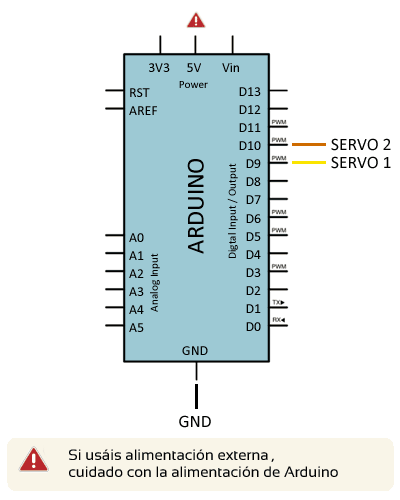
El esquema eléctrico es muy sencillo, únicamente tenemos que controlar los dos servos como vimos en la entrada Controlar un servo con Arduino. Por tanto, únicamente necesitamos dos salidas digitales cualquiera de Arduino (por ejemplo, 8 y 9)
Por tanto, la conexión vista desde Arduino es la siguiente
Y la conexión de los servos, a la que ya estamos más que acostumbrados, es la siguiente
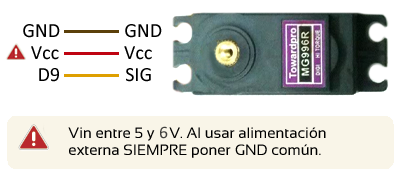
Para la alimentación necesitaremos poner GND común, y alimentar los servos con una tensión de 5-6V.
En el caso de una torreta pequeña con motores tipo SG-90, el regulador de Arduino es suficiente para mover ambos servos (aunque no está de más si tenéis alimentación independiente).

En el caso de la torre metálica con motores tipo MG996R, va a ser demasiado consumo para moverlos con Arduino, por lo que obligatoriamente tendremos que usar una fuente externa.

Para alimentarlo con baterías, mi opción favorita es una batería de NiMh de 5 celdas, que nos proporciona 6V, que es un voltaje muy adecuado para manejar servos.

Otra opción es emplear una fuente regulada (por ejemplo, un powerbank de los de cargar móviles) que proporcionan 5V, y emplearlos para Arduino y para los Servos.
Sin embargo, las baterías LiPo nos dan entre 7.4 a 8.2V, que es demasiado forzar los servos. En este caso tendremos que instalar un regulador de voltaje.
Finalmente, después del montaje, normalmente querremos hacer algo para que no tengamos los cables enmarañados. Tenemos diversas opciones, desde dar un pequeño toquecito de pegamento a los cables en ciertos puntos, con cuidado de no dañarlos, o pegar algún tipo de brida o sujeción de plástico que nos haga de guía de cables mientras se mueve el servo.
¡Y ya está terminado! Únicamente falta poner lo accesorios que queráis (sensores, etc) en la torreta. En la próxima entrada veremos ejemplos de código para controlar la torreta.
tutoriales de Arduino