
¡Motores paso a paso con la biblioteca AccelStepper! Deja un comentario
CONEXIONES

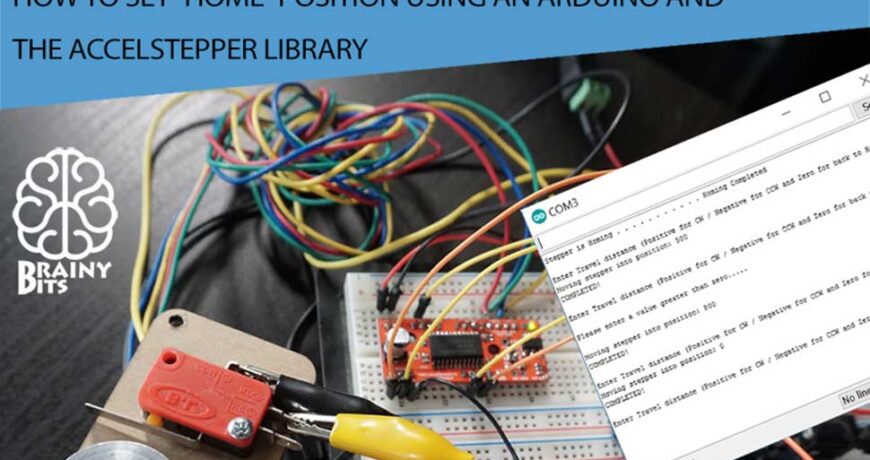
Esta vez estamos usando el Arduino NANO en lugar de la ONU. Dado que el NANO es básicamente una versión más pequeña de UNO (dar o quitar algunas diferencias), las conexiones serían similares, pero dado que estamos utilizando la biblioteca AccelStepper necesitamos aún menos conexiones.
El controlador fácil:
El pin 2 del NANO está conectado a STEPS
Pin 3 a DIR
y GND está conectado a un pin GND en el Arduino
* El voltaje y GND (en la parte superior del Easy Driver) están conectados a una fuente de alimentación de 12V 1A.
El motor NEMA 17 que estamos utilizando tiene un consumo máximo de amperaje de alrededor de 0.45A.
Conexiones de motor paso a paso:
Los 4 cables del paso a paso NEMA (2 por bobina) están conectados directamente a los pines del grupo Easy Driver A y B.
Una manera rápida de identificar qué cables son parte de la misma bobina es conectar dos de esos cuatro cables y si siente resistencia al intentar girar el eje del motor paso a paso, eso significa que esos 2 cables son parte de la misma bobina.
El pin del interruptor de límite NO (normalmente abierto) está conectado al pin 9 del Arduino
El pin COM (común) del interruptor está conectado a un pin GND en el Arduino
EL CÓDIGO
Como en nuestro último tutorial, queremos comenzar a buscar el stepper de inmediato en el inicio.
La forma en que funciona la biblioteca AccelStepper, es que al inicio el valor de la posición siempre es cero, luego le dice a la biblioteca que se mueva a una posición relativa a la posición cero.
Por ejemplo, si configura la posición para “mover a” a 300, y luego emite el comando “ejecutar”, el paso a paso se moverá 300 pasos en el sentido de las agujas del reloj desde la posición cero.
Si después de esto, establece la posición en 350, el paso a paso se moverá en el sentido de las agujas del reloj 50 pasos, dado que ya está en la posición 300.
Entonces, la posición para moverse es relativa a la posición actual.
Un número negativo moverá el paso a paso en el sentido contrario a las agujas del reloj.
En este tutorial, estamos usando la ventana Serial Monitor para controlar los movimientos del stepper una vez que se completa el Homing.
Como siempre, para obtener más información sobre el tutorial y la explicación del código, mire nuestro video tutorial.
/ * Código de inicio del motor con AccelStepper y el monitor serial
Creado por Yvan / https: // Inteligente - Bits . com
Este código es en el dominio público ... Puede: copiarlo, usarlo, modificarlo, compartirlo o simplemente ignóralo ! Gracias !
* /
#include "AccelStepper.h"
// Biblioteca creada por Mike McCauley en http: // www . Airspayce . com / mikem / arduino / AccelStepper /
// Configuración de AccelStepper
AccelStepper stepperX ( 1 , 2 , 3 ); // 1 = Interfaz de fácil manejo // NANO Pin 2 conectado al pin STEP de Easy Driver // NANO Pin 3 conectado al pin DIR de Easy Driver // Definir los pines utilizados #define home_switch 9 // Pin 9 conectado al Home Switch (MicroSwitch)
// Variables de viaje paso a paso largo TravelX; // Se usa para almacenar el valor X ingresado en el monitor serial En t move_finished = 1 ; // Usado para verificar Si movimiento es terminado largo initial_homing = - 1 ; // Utilizado para Home Stepper al inicio
void setup () {
De serie . empezar( 9600 ); // Inicie el monitor serie con velocidad de 9600 Baudios
pinMode (home_switch, INPUT_PULLUP);
retrasar( 5 ); // Espere para EasyDriver se despierta // Establecer velocidad máxima y Aceleración de cada Steppers al inicio para buscador de blancos
stepperX . setMaxSpeed ( 100.0 ); // Establezca la velocidad máxima de paso a paso (más lento para obtener una mejor precisión)
stepperX . setAcceleration ( 100.0 ); // Establecer la aceleración de Stepper // Comience el procedimiento de Homing del Motor paso a paso al inicio
De serie . impresión ( "Stepper es Homing ...". ); mientras (digitalRead (home_switch)) { // Haga que el Stepper se mueva CCW hasta que el interruptor es activado
stepperX . moveTo (initial_homing); // Establezca la posición para moverse a
initial_homing - ; // Disminuir por 1 para siguiente movimiento Si necesario
stepperX . correr(); // Comience a mover el paso a paso
retrasar( 5 );
}
stepperX . setCurrentPosition ( 0 ); // Establecer la posición actual como cero para ahora
stepperX . setMaxSpeed ( 100.0 ); // Establezca la velocidad máxima de paso a paso (más lento para obtener una mejor precisión)
stepperX . setAcceleration ( 100.0 ); // Establecer la aceleración de Stepper
initial_homing = 1 ; mientras ( ! digitalRead (home_switch)) { // Haga que el Stepper se mueva CW hasta que el interruptor es desactivado
stepperX . moveTo (initial_homing);
stepperX . correr();
initial_homing ++ ;
retrasar( 5 );
}
stepperX . setCurrentPosition ( 0 );
De serie . println ( "Homing Completed" );
De serie . println ( "" );
stepperX . setMaxSpeed ( 1000.0 ); // Establecer velocidad máxima de paso a paso (más rápido para movimientos regulares)
stepperX . setAcceleration ( 1000.0 ); // Establecer la aceleración de Stepper // Imprima las instrucciones en el monitor serie al inicio
De serie . println ( "Introduzca la distancia de viaje (Positivo para CW / Negativo para CCW y Cero para volver a Inicio):" );
}
void loop () { mientras (De serie . disponible() > 0 ) { // Comprobar Si los valores están disponibles en el tampón serial
move_finished = 0 ; // Establecer variable para control de movimiento del paso a paso
TravelX = De serie . parseInt (); // Poner valor numérico de buffer en TravelX variable
Si (TravelX 0 || TravelX > 1350 ) { // Asegúrese de que la posición ingresada es no más allá del HOGAR o Posición MAX
De serie . println ( "" );
De serie . println ( "Introduzca un valor mayor que cero y menor o igual a 1350 ....." );
De serie . println ( "" );
} más {
De serie . impresión ( "Mover paso a paso a la posición:" );
De serie . println (TravelX);
stepperX . moveTo (TravelX); // Establecer nueva posición moveto de Stepper
retrasar( 1000 ); // Espere 1 segundos antes de mover el paso a paso
}
} Si (TravelX > = 0 && TravelX 1350 ) { // Comprobar Si el Stepper ha alcanzado la posición deseada Si ((stepperX . distanceToGo () ! = 0 )) {
stepperX . correr(); // Mueva a Stepper a su posición
} // Si se mueve es mensaje de visualización completado en el monitor serie Si ((move_finished == 0 ) && (stepperX . distanceToGo () == 0 )) {
De serie . println ( "¡TERMINADO!" );
De serie . println ( "" );
De serie . println ( "Introduzca la distancia de viaje (Positivo para CW / Negativo para CCW y Cero para volver a Inicio):" );
move_finished = 1 ; // Restablecer variable de movimiento
}
}
}
DESCARGAR
Copie el código de Croquis anterior que desea usar arriba en su software Arduino IDE para programar su Arduino.
Descargue la biblioteca AccelStepper creada por Mike McCauley aquí