

Los investigadores proponen un actuador suave basado en resortes helicoidales que utiliza dos motores ultrasónicos flexibles Deja un comentario
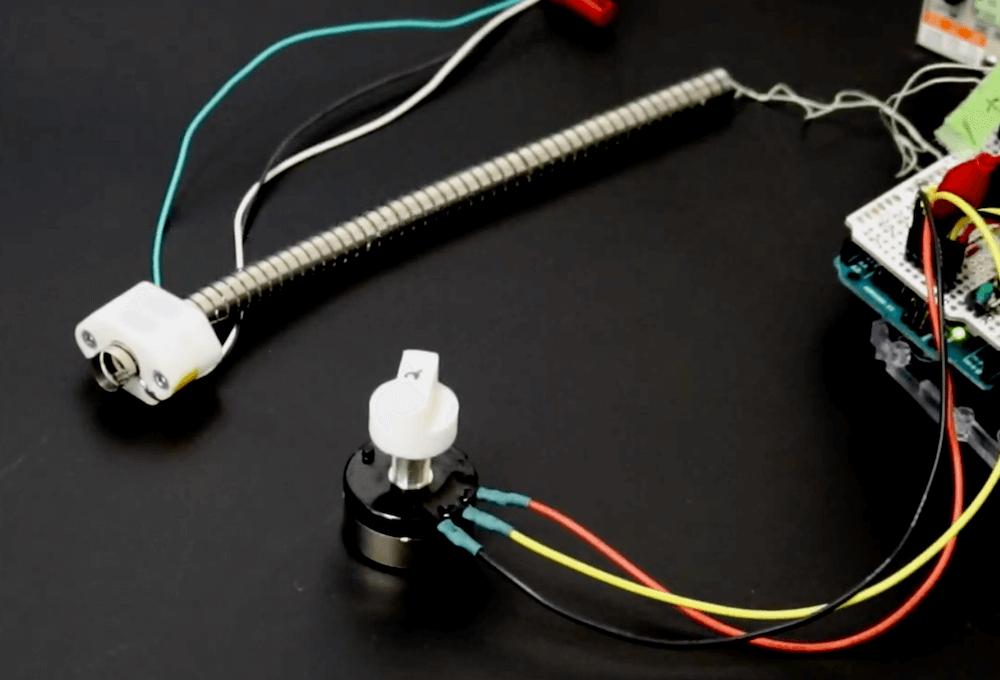
Los investigadores Yunosuke Sato, Ayato Kanada y Tomoaki Mashimo han desarrollado un nuevo actuador de robot continuo (serpiente) que puede flexionar y sentir su posición con conjuntos de muelles helicoidales gemelos. Cada uno usa un par de actuadores piezoeléctricos para inducir vibraciones ultrasónicas en un bloque de estator, empujando el resorte hacia adentro hacia adelante o hacia atrás. Cuando se combinan, los resortes pueden avanzar juntos o girar hacia la izquierda y hacia la derecha cuando se varían las longitudes.
La detección de extensión se logra mediante la retroalimentación de voltaje a través de los resortes, lo que permite que su configuración experimental basada en Arduino Uno determine cada posición sin equipo adicional. Con estos datos, se puede calcular el ángulo de curvatura de los dos resortes juntos, y aunque la “serpiente” ahora funciona en dos dimensiones, ¡quizás un sistema de este tipo podría usarse con otro resorte para un control 3D total!
Para obtener más información, el artículo de investigación del equipo está disponible aquí .
Fuente:
Researchers propose a coil spring-based soft actuator using two flexible ultrasonic motors