
Interrupciones con Arduino a través de un ejemplo práctico Deja un comentario
Los microcontroladores Atmel incorporan un mecanismo que en muchas ocasiones es desconocido por todos nosotros. Las interrupciones con Arduino nos permitirán reaccionar a eventos externos a la placa de una forma rápida. Cuando se detecta una señal, una interrupción, interrumpe el proceso que se está ejecutando. Esto nos va a permitir dos cosas. Por un lado, ejecutar rápidamente un trozo de código, y por otro lado parar la ejecución del código que se estaba ejecutando.
Por ejemplo, imagínate que quieres cocinar una pizza en el horno. Lo típico es que calientes el horno a una determinada temperatura, metas la pizza y programes el reloj durante 25 minutos. Mientras, te vas a ver la televisión. Cuando el reloj termina la cuenta atrás, suena un timbre e interrumpes de ver la televisión para atender al horno. Sacas la pizza del horno, te la llevas al salón y sigues viendo la televisión. Esto sería un ejemplo de la vida real de cómo funcionan las interrupciones.
Las interrupciones no son simplemente para cambiar y hacer algo diferente. Por ejemplo, estamos montando en bicicleta llegamos a casa y guardamos la bici en el garaje o un botón es pulsado por el usuario y permite parar el DFRobot. En estos dos casos no interrumpimos una acción, pasamos a hacer algo diferente. Terminamos de hacer una cosa y hacemos otra. En el caso del botón, lo máximo que podemos hacer es recordar el estado de botón pulsado. Debemos utilizar las interrupciones para lo que son, interrumpir lo que se está ejecutando y realizar otra tarea, para luego volver al mismo sitio donde lo habíamos dejado.
Dentro de la gama de interrupciones con Arduino están las interrupciones programadas y las interrupciones externas. La filosofía es la misma, poder ejecutar un código cuando sucede un evento concreto. En el caso de las interrupciones programadas, el evento se disparará cada cierto intervalo de tiempo que debemos de configurar. Este tipo de interrupciones no es el objeto de este artículo. Si quieres saber más puedes ver la referencia de la librería TimerOne que se encarga de configurar y gestionar este tipo de interrupciones.
El otro tipo de interrupciones, las externas, nos permite reaccionar a eventos externos. Un evento puede ser que se pulsa un botón, o que un sensor capta cierta información.
Por qué utilizar interrupciones con Arduino
Utilizar interrupciones nos permitirá olvidarnos de controlar ciertos pines. Esto muy importante ya que dentro de una aplicación o programa, no vamos a hacer una única cosa. Por ejemplo, queremos que un LED se encienda o se apague cuando pulsamos un botón. Esto es realativamente sencillo pero cuando además queremos que otro LED parpadee, la cosa se complica.
La probabilidad de capturar el evento cuando se pulsa el botón disminuye con el aumento de tiempo de parpadeo. En estos casos, y en muchos otros, nos interesa liberar el procesador de Arduino para que solo cuando se pulse el botón, haga una acción determinada. Así no tendremos que estar constantemente comprobando el pin X si ha pulsado el botón.
Precisamente este es el sentido de las interrupciones, poder hacer otras cosas mientras no suceda el evento, pero cuando ese evento externo esté presente, que ejecute rápidamente el código asociado.
Internamente, Arduino (mejor dicho el microcontrolador AtMega) tiene ciertas interrupciones configuradas que lanza según la situación. Para la transmisión de datos a través del puerto serie, para resetear la placa antes de cargar un programa, comunicación I2C, etc…
En este caso, nosotros mismos crearemos nuestras propias interrupciones asociadas a ciertos pines según el tipo de placa.
Cómo utilizar interrupciones con Arduino
Dentro de la placa de Arduino encontramos diferentes pines que nos permiten tener interrupciones. Dependerá del tipo de placa.
Pines
| Placa | Pines interrupciones |
|---|---|
| Uno, Nano, Mini | 2, 3 |
| Mega, Mega2560, MegaADK | 2, 3, 18, 19, 20, 21 |
| Micro, Leonardo | 0, 1, 2, 3, 7 |
| Zero | Todos los pines digitales excepto el 4 |
| MKR1000 | 0, 1, 4, 5, 6, 7, 8, 9, A1, A2 |
| Due, 101 | Todos los pines digitales |
Para poder utilizar interrupciones con Arduino no necesitamos incorporar ningún tipo de librería a nuestro programa. Únicamente necesitamos hacer referencias a ciertas funciones o métodos. Ahora veremos cuales son.
attachInterrupt(pin, ISR, modo)
Esta función nos va a permitir definir o configurar uno de los pines como un puerto de interrupción. Los tres parámetros que admite son:

detachInterrupt(pin)
Si attachInterrupt() nos permite configurar un pin como interrupción, el método detachInterrupt() anula esa configuración. Como parámetro le pasamos el pin y lo podemos hacer con la función digitalPinToInterrupt(número de pin) que nos devolverá el ordinal del pin del que queremos anular la configuración.
Ejemplo práctico: controlando la velocidad de las luces del coche fantástico
La mejor manera de aprender es poniendo en práctica lo aprendido en la teoría. Para ello lo que vamos a hacer es el típico sketch con las luces del coche fantástico. En este caso vamos a controlar la velocidad con la que se mueve a través de dos pulsadores.
Circuito eléctrico
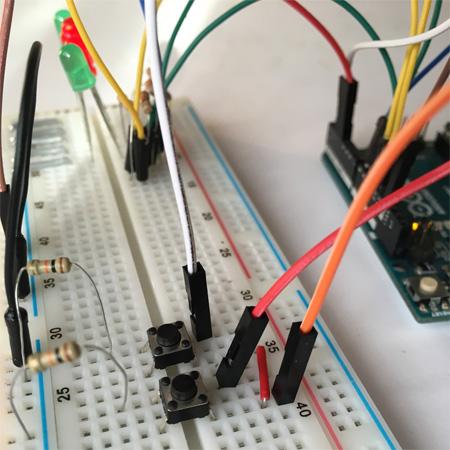
Vamos a necesitar el siguiente material:
- 2 LEDs verdes
- 3 LEDs rojos
- 5 resistencias de 470 Ω
- 2 pulsadores
- 1 resistencia de 1 kΩ
- Arduino UNO
- Protoboard
- Cables macho/macho
Cada pulsador irá conectado a un pin y tendrán una resistencia pull-down. Esto hará que en estado normal, sin pulsar, el pin tengamos un estado bajo. Cuando el pulsador se active tendremos un estado alto. Por lo tanto debemos de detectar un cambio de estado de bajo a alto (RISING).
Por otro lado, los LEDs van a hacer una secuencia de encenderse y apagarse de izquierda a derecha y de derecha a izquierda. Simula las luces del coche fantástico. Empezaremos con una velocidad y según vayamos pulsando los pulsadores se irá aumentando o disminuyendo la velocidad.
El esquema eléctrico es el siguiente.

Programación del sketch de interrupciones con Arduino
La primera parte es la declaración de contantes y variables. En este punto hay que hacer una aclaración. Cuando trabajamos con interrupciones con Arduino, hay que llevar especial cuidado con los métodos ISR que se van a ejecutar cuando se produce el evento.
En general, debemos hacer métodos o funciones ISR lo más cortas y rápidas posibles. Se puede producir un bloqueo entre los diferentes ISR. Lo que sucede en estos casos es que solo se ejecuta una a la vez quedando en cola el resto de interrupciones.
Dentro de las interrupciones no funciona el delay() (retardo) por lo tanto no lo utilices. Recuerda que se trata de ejecutar un código lo más rápido posible. Si quieres hacer que el proceso se pare dentro de un ISR utiliza la función delayMicrosends(), ya que funciona con normalidad.
Las variables que vayamos a utilizar tanto dentro de los métodos ISR como fuera, ya sea en el loop() o en cualquier otra función, debemos declararlas como volatile. Esta palabra reservada le dice al compilador que estas variables pueden cambiar de valor en cualquier momento y, por lo tanto, el compilador debe volver a cargar la variable cada vez que se hace referencia en algún sitio a ella. Al contrario que ocurre con otras variables donde el compilador confía en alguna copia que pueda tener en algún registro del procesador.
Sketch luces del coche fantástico con interrupciones
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
/* https://programarfacil.com Compártelo a todo el mundo 🙂 */ // Variable global de velocidad volatile int velocidad = 20; // Constantes de velocidad máxima, mínima y cuanto aumenta const int maxima = 1000; const int minima = 20; const int aumenta = 20; // Array con los números de los pines donde están conectados // los LEDs de las luces del coche fantástico int leds[5] = {8, 9, 10, 11, 12}; void setup() { // Inicializamos los pines de los LEDs como salida y a estado bajo for (int i = 0; i < 5; i++) { pinMode(leds[i], OUTPUT); digitalWrite(leds[i], LOW); } // Asignamos la velocidad mínima velocidad = minima; // Configuramos los pines de interrupciones para que // detecten un cambio de bajo a alto attachInterrupt(digitalPinToInterrupt(2), velocidadMenos, RISING); attachInterrupt(digitalPinToInterrupt(3), velocidadMas, RISING); } void loop() { // Este primer bucle recorre el array de izquierda a derecha for (int i = 0; i < 5; i++) { // Solo para el segundo pin y consecutivos apagamos el pin anterior // En el caso de 0 no hace falta ya que por defecto está apagado // Cuidado que nos salimos del rango del array 0-1=-1 no existe este elemento if (i > 0) { // Apagamos el LED a la izquierda digitalWrite(leds[i – 1], LOW); } // Encendemos en el LED en el que estamos digitalWrite(leds[i], HIGH); // Esperamos el tiempo marcado por velocidad delay(velocidad); } // Apagamos el último LED encendido, el elemento 5 del array digitalWrite(leds[4], LOW); // Recorremos el array en sentido inverso de derecha a izquierda for (int i = 4; i >= 0; i—) { // En el primer caso como ya está apagado el LED no hacemos nada // Cuidado que nos salimos del rango del array 4+1=5 no existe este elemento if (i < 4) { // Apagamos el LED a la derecha digitalWrite(leds[i + 1], LOW); } // Encendemos en el LED en el que estamos digitalWrite(leds[i], HIGH); // Esperamos el tiempo marcado por velocidad delay(velocidad); } // Apagamos el último LED encendido, el elemento 0 del array digitalWrite(leds[0], LOW); } // ISR pin 2, disminuye la velocidad void velocidadMenos() { // Disminuimos el valor establecido velocidad = velocidad – aumenta; // Si hemos llegado a la velocidad mínima no disminuímos más if (velocidad < minima) { velocidad = minima; } } // ISR pin 3, aumenta la velocidad void velocidadMas() { // Aumentamos el valor establecido velocidad = velocidad + aumenta; // Si hemos llegado a la velocidad máxima no aumentamos más if (velocidad > maxima) { velocidad = maxima; } } |
Y hasta aquí el artículo donde hemos visto las interrupciones con Arduino. Es muy importante conocer muy bien esta técnica ya que nos ahorrará mucho trabajo en ciertas ocasiones.