

Creando un robot parecido a un tentáculo con Arduino Deja un comentario
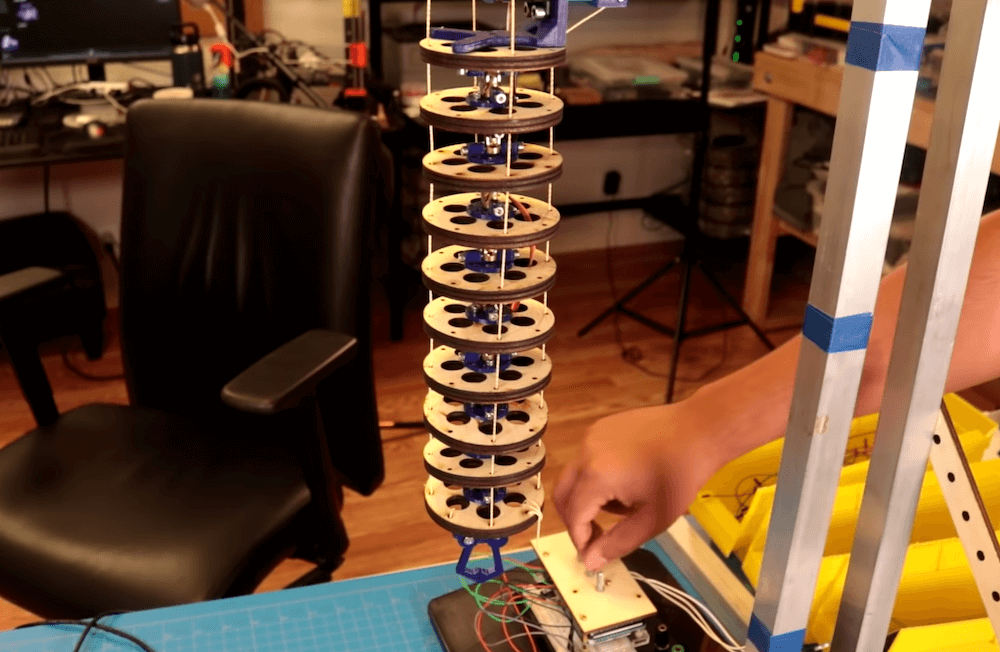
Los robots continuos, que parecen un tentáculo o tal vez la trompa de un elefante, utilizan una serie de secciones de enlace y tendones internos para moverse tanto horizontal como verticalmente. Si bien pueden parecer bastante exóticos, en el siguiente video, DJ Harrigan de element14 Presents analiza cómo construyó uno con un Arduino Mega y una lista bastante simple de partes.
El mecanismo robótico cuelga de una estructura de soporte, con juntas universales que permiten que cada sección se doble, pero no se tuerza, con respecto a la siguiente. Estas 10 secciones se tiran en diferentes direcciones utilizando dos servos y un cable de Kevlar, con una interfaz de usuario proporcionada por dos potenciómetros. Una tercera olla acciona otro motor conectado al tentáculo, que actúa como pinza para herramientas o cualquier otra cosa que Harrigan necesite en ese momento.
Fuente: