
Controlar dos motores DC con Arduino y driver TB6612FNG Deja un comentario
El TB6612FNG es un controlador (driver) de motores que nos permite manejar dos motores de corriente continua desde Arduino, variando tanto la velocidad como el sentido de giro.
El TB6612FNG puede ser considerado una versión mejorada del L298N. Al igual que esté, internamente está formado por dos puentes-H, junto con la electrónica necesaria para simplificar su uso, y eliminar posibles cortocircuito por errores de uso.
Sin embargo, en el caso del TB6612FNG los puentes-H están formados por transistores MOSFET, en lugar de transistores BJT como en el L298N. Esto permite que el TB6612FNG tiene mejor eficiencia y menores dimensiones que el L298N.
El TB6612FNG también permite controlar intensidades de corriente superiores, siendo capaz de suministrar 1.2A por canal de forma continua, y 3.2A de pico. Recordar que el L298N tiene una intensidad máxima teórica de 2A, pero las pérdidas hace que en la práctica sólo pueda suministrar 0.8-1A.
Además, el TB6612FNG no tiene la caída de tensión que sí tiene el L298N debido a sus transistores BJT, que podían llegar a ser superiores a 3V. En su lugar, el TB6612FNG se comporta como una pequeña resistencia de 0.5 Ohm.
Como puntos negativos, el TB6612FNG puede proporcionar tensiones inferiores, de hasta 13.5V (frente a los 35V del L298N). Además, es algo más difícil de montar, ya que las placas con L298N frecuentemente incorporan placas de conexión, que permiten conectar de forma sencilla el motor.
Finalmente, la protección contra corrientes inducidas son algo más limitadas que las del L298N, por lo que podemos tener algún reinicio de Arduino cuando alimentamos cargas medianas o grandes.
El TB6612FNG dispone de dos canales, por lo que es posible controlar dos motores de corriente continua de forma independiente. También puede controlar un único motor paso a paso aunque, en general, preferiremos usar controladores específicos.
En cada canal podemos controlar el sentido de giro y la velocidad, para lo cual admite una señal PWM de frecuencia máxima de 100 kHz (muy por debajo del rango normal de PWM en Arduino)
El TB6612FNG dispone de protecciones térmicas, de inversión de corriente en la fuente de suministro de los motores, condensadores de filtrado en ambas líneas de alimentación, detección de bajo voltaje, y protecciones contra las corrientes inducidas en los motores.
El TB6612FNG también incorpora un modo de Standby, que desactiva por completo el controlador, entrando en un modo de ahorro de energía.
El controlador TB6612FNG puede ser empleado en proyectos de electrónica y robótica. Es ampliamente usado en proyectos electrónico y robótica, por su sencillez de uso, bajo coste, y buena calidad precio
El controlador TB6612FNG es un dispositivo barato. En un principio el TB6612FNG era más caro que el L298N, pero los precios descendieron y en la actualidad el TB6612FNG es más barato que el L298N.
Podemos encontrar un TB6612FNG por 1,10€ en vendedores internacionales de AliExpress o eBay.

El esquema de montaje no es demasiado complicado. Por un lado, suministramos la tensión que alimentará el motor desde una fuente de alimentación externa, mediante el pin VM. La tensión máxima es de 15V.
Además, tenemos que alimentar la electrónica del módulo mediante el pin VCC. El rango de tensión para VCC es 2.7 a 5.5V.
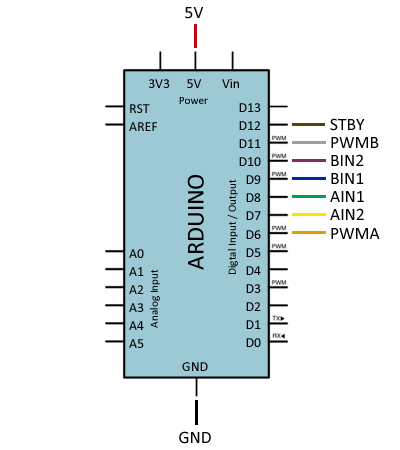
Para el control del módulo Los pines AIN1, AIN2 Y PWMA controlan el canal A, mientras que los pines BIN1, BIN2, y PWMB controlan el canal B.
Finalmente, el pin STBY controla el modo Standby. Debemos ponerlo en HIGH para activar el motor. Podemos conectarlo a un pin digital de Arduino, si queremos poder activar el modo Standby, o conectarlo a VCC si queremos dejarlo permanentemente desconectado.

La conexión, vista desde Arduino quedaría de la siguiente forma.
El código necesario es similar al que vimos al ver el L298N. Igualmente, conviene que agrupemos el código en funciones que podamos reutilizar, o el código crecerá rápidamente.
El siguiente código permite desplazar y girar un vehículo, actuando sobre ambos motores. Empleamos el modo Standby para reducir el consumo cuando esté parado, alargando la batería.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 |
const int pinPWMA = 6; const int pinAIN2 = 7; const int pinAIN1 = 8; const int pinBIN1 = 9; const int pinBIN2 = 10; const int pinPWMB = 11; const int pinSTBY = 12; const int waitTime = 2000; //espera entre fases const int speed = 200; //velocidad de giro const int pinMotorA[3] = { pinPWMA, pinAIN2, pinAIN1 }; const int pinMotorB[3] = { pinPWMB, pinBIN1, pinBIN2 }; enum moveDirection { forward, backward }; enum turnDirection { clockwise, counterClockwise }; void setup() { pinMode(pinAIN2, OUTPUT); pinMode(pinAIN1, OUTPUT); pinMode(pinPWMA, OUTPUT); pinMode(pinBIN1, OUTPUT); pinMode(pinBIN2, OUTPUT); pinMode(pinPWMB, OUTPUT); } void loop() { enableMotors(); move(forward, 180); delay(waitTime); move(backward, 180); delay(waitTime); turn(clockwise, 180); delay(waitTime); turn(counterClockwise, 180); delay(waitTime); fullStop(); delay(waitTime); } //Funciones que controlan el vehiculo void move(int direction, int speed) { if (direction == forward) { moveMotorForward(pinMotorA, speed); moveMotorForward(pinMotorB, speed); } else { moveMotorBackward(pinMotorA, speed); moveMotorBackward(pinMotorB, speed); } } void turn(int direction, int speed) { if (direction == forward) { moveMotorForward(pinMotorA, speed); moveMotorBackward(pinMotorB, speed); } else { moveMotorBackward(pinMotorA, speed); moveMotorForward(pinMotorB, speed); } } void fullStop() { disableMotors(); stopMotor(pinMotorA); stopMotor(pinMotorB); } //Funciones que controlan los motores void moveMotorForward(const int pinMotor[3], int speed) { digitalWrite(pinMotor[1], HIGH); digitalWrite(pinMotor[2], LOW); analogWrite(pinMotor[0], speed); } void moveMotorBackward(const int pinMotor[3], int speed) { digitalWrite(pinMotor[1], LOW); digitalWrite(pinMotor[2], HIGH); analogWrite(pinMotor[0], speed); } void stopMotor(const int pinMotor[3]) { digitalWrite(pinMotor[1], LOW); digitalWrite(pinMotor[2], LOW); analogWrite(pinMotor[0], 0); } void enableMotors() { digitalWrite(pinSTBY, HIGH); } void disableMotors() { digitalWrite(pinSTBY, LOW); } |
En un proyecto complejo, estas funciones estarían integradas en los objetos que integran nuestro modelo.