
Construyendo un bot bípedo basado en Arduino Deja un comentario
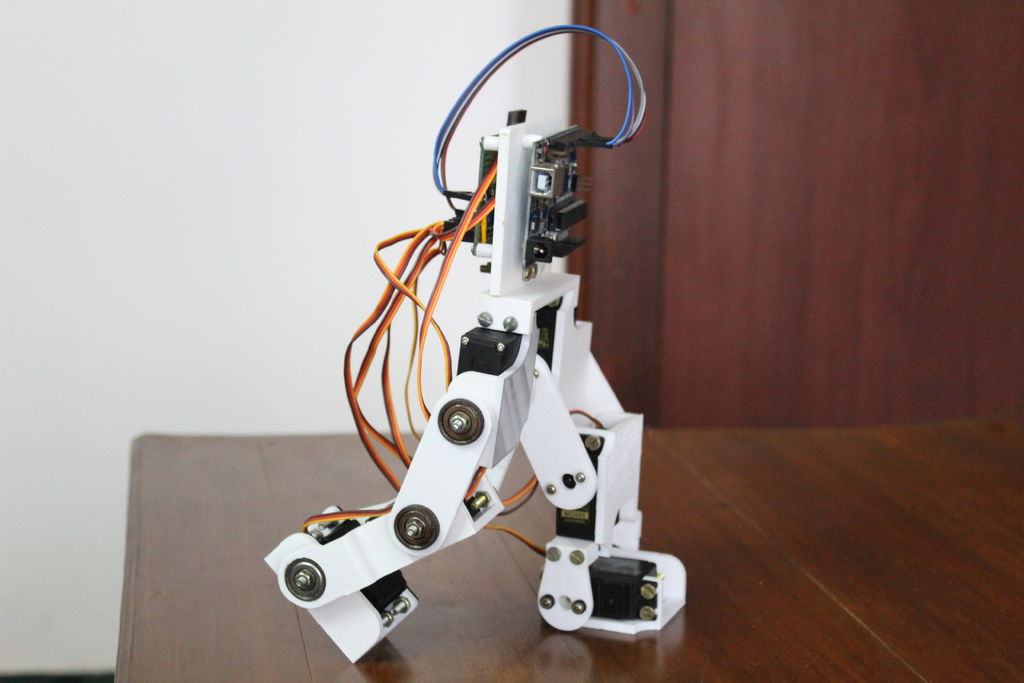
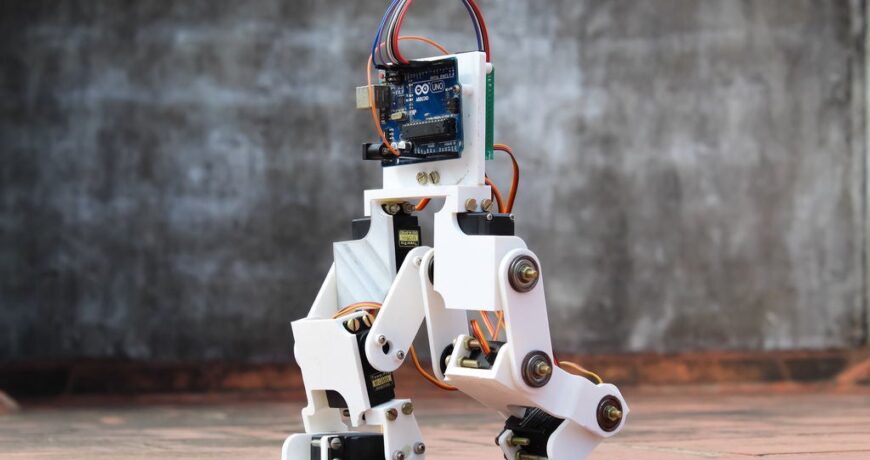
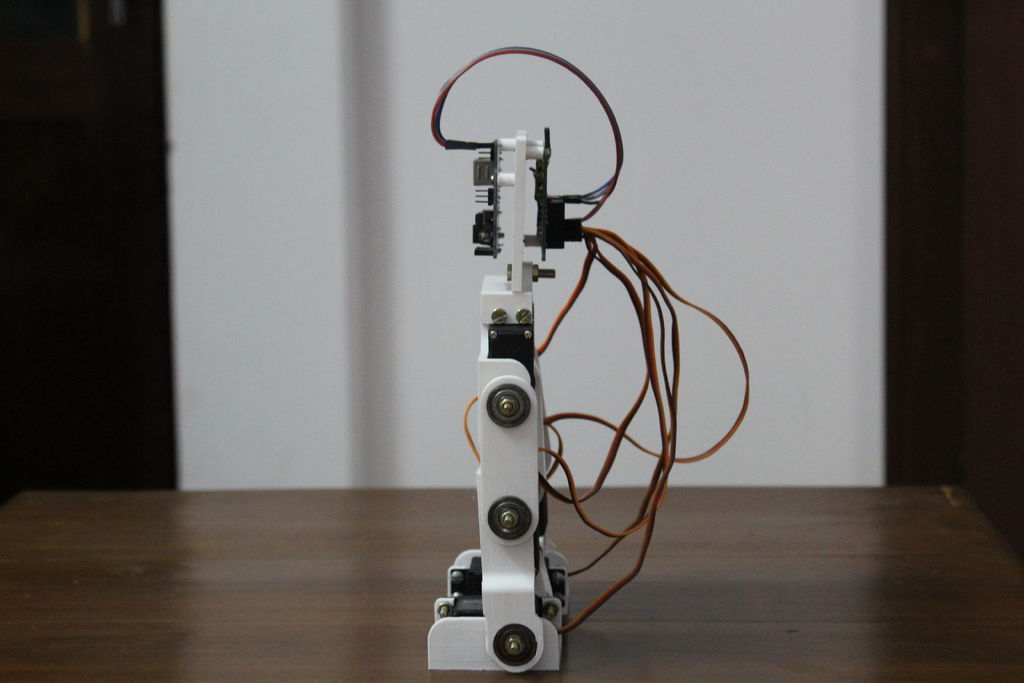
Si desea construir un robot bípedo andante, este diseño impreso en 3D por Technovation parece un lugar fantástico para comenzar . Cada pierna presenta tres servos que la activan en la cadera, la rodilla y el tobillo para un total de seis grados de libertad.
El control es manejado por una placa Arduino Uno que se monta en la parte superior de las patas, junto con una placa de perfilado para conectarse directamente a los servos.
Los movimientos se calculan mediante cinemática inversa, lo que significa que uno simplemente tiene que ingresar las posiciones xyz, y el Arduino calcula los servo ángulos adecuados. El bot incluso puede dar pasos entre dos y 10 centímetros sin caerse.
Puede seguir cualquier respuesta a esta entrada a través del feed RSS 2.0 .
Puede dejar una respuesta o trackback desde su propio sitio.
Fuente: