
Caminatas bípedas robóticas en cinemática inversa Deja un comentario
Los proyectos de robótica son siempre los favoritos de los hackers. Ser capaz de dar vida a su proyecto casi literalmente evoca un tipo especial de alegría que realmente impulsa nuestra imaginación más salvaje. Imaginamos que esta es una de las inspiraciones para el auge de las tecnologías interactivas que están inundando el mercado en estos días. Bueno, [Technovation] tuvo el mismo pensamiento y decidió construir un bípedo robótico totalmente articulado .
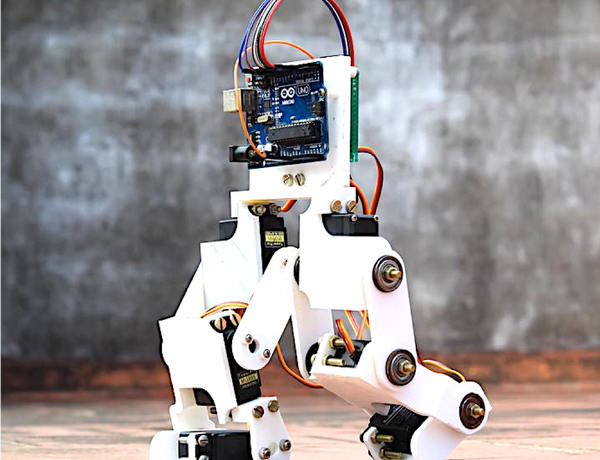
Cada pierna tiene puntos de pivote en el pie, la rodilla y la cadera, imitando la articulación de la pierna humana. Para controlar los movimientos del robot, [Technovation] utiliza cinemática inversa, un método para calcular los movimientos de unión en lugar de programarlos explícitamente. El usuario ingresa las coordenadas finales de cada pie, en oposición a cada ángulo de unión individual, y una función especial genera los ángulos de unión necesarios para alcanzar cada coordenada final. Esta parte del software está bien comentada y vale la pena investigar.
En caso de que desee cambiar la altura del robot o su longitud de zancada, [Technovation] proporciona algunas constantes globales en el firmware que ajustarán automáticamente los cálculos para adaptarse a las dimensiones del nuevo robot. De todos los diversos aspectos de este proyecto, la descripción detallada nos impresionó más. El robot fue diseñado en Fusion 360 y las partes se imprimieron en 3D, lo que permite la máxima flexibilidad de diseño para el próximo hacker.
Quizás el bípedo de [Technovation] ayudará a resucitar la locura del robot social . Hasta entonces, feliz pirateo.