
Brazo SCARA impreso en 3D con componentes de impresora 3D Deja un comentario
Uno de los efectos secundarios del auge de las impresoras 3D ha sido el aumento de la disponibilidad y el bajo costo de los componentes de la impresora 3D, que se utilizan para una amplia gama de aplicaciones. [How To Mechatronics] aprovechó esto y construyó un brazo de robot SCARA utilizando piezas impresas en 3D y componentes comunes de impresoras 3D.
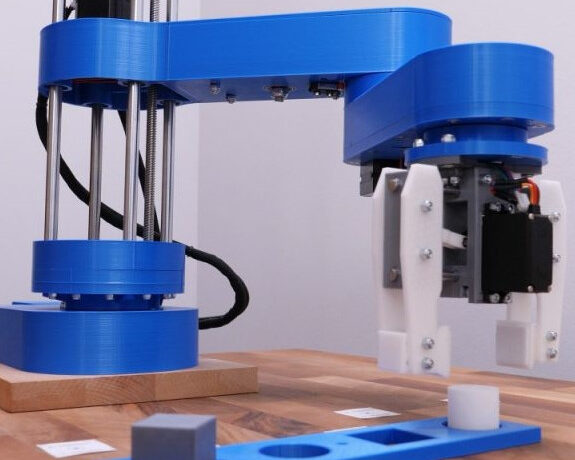
El mecanismo básico de SCARA es un brazo de dos enlaces, similar a un brazo humano. El extremo de la segunda articulación puede moverse a través del plano XY girando en la base y el codo del mecanismo. [How To Mechatronics] agregó movimiento en Z moviendo la base del primer brazo sobre cuatro varillas lineales verticales con un tornillo de avance. Una combinación de cojinetes de empuje y cojinetes de bolas permite una rotación suave de cada una de las juntas, que se accionan por correa con motores paso a paso NEMA17. Cada articulación tiene un microinterruptor en una determinada posición en su rotación para darle una posición inicial. Las mordazas de la pinza se deslizan sobre dos varillas lineales paralelas y se accionan con un servo. Para controlar los motores, se utilizó un escudo paso a paso Arduino Uno y CNC.
El brazo se opera desde una computadora con una GUI escrita en Processing, que envía instrucciones al Arduino en serie. La GUI permite tanto el control cinemático directo directo de las articulaciones como el control cinemático inverso, que moverá automáticamente la pinza a una coordenada especificada. La GUI también puede guardar posiciones y luego unirlas para completar tareas de forma autónoma.
La articulación de la base se tambalea un poco debido al peso del resto del brazo, pero esto podría arreglarse usando un marco para sostenerlo también en la parte superior. Nos gusta mucho el hecho de que se hayan utilizado componentes comúnmente disponibles, y el enlace del primer párrafo tiene instrucciones detalladas y archivos fuente para crear los suyos propios. Si el juego restante se puede resolver, podría ser una plataforma CNC de trabajo liviano decente, especialmente con la huella pequeña y el área de recorrido grande. Esto es muy similar a un robots SCARA de madera que hemos visto antes, excepto que uno coloca el eje Z en la pinza. También hemos visto algunas impresoras 3D y trazadores de lápiz que usaban este diseño.